


Programmation du



Mbot 2
AVANT DE COMMENCER ...
1/ Contrairement au Mbot 1, le Mbot 2 est programmé avec "CyberPi", il faut alors ajouter des "EXTENSIONS" pour utiliser les moteurs et les capteurs du Mbot 2:
2/ Importer les extensions suivantes:
3/ Cliquer sur "Mode Téléverser":
4/ Placer la 1ère brique nécessaire à toute programmation du robot:





N1/ Programmer le déplacement SIMPLE du robot
1/ Ce que le robot Mbot2 doit faire:
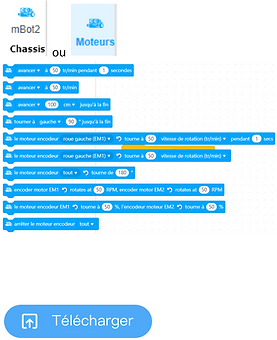
En utilisant des instructions du menu : Moteurs,
programmer et tester l’algorithme permettant au robot
de réaliser un carré de 15 cm de côté.
Remarque : pour tester les scripts vous devez les télécharger.
2/ Avertir les usagers - Compléter et tester les scripts afin :
-
d’afficher la couleur Rouge quand le robot avance,
-
afficher la couleur Bleue quand le robot tourne,
-
afficher la couleur verte quand le robot est à l'arrêt.
3/ Communiquer avec le programmateur (débugger).
Complétez votre script pour que le robot utilise l'écran en affichant :
-
le déplacement (avancer, tourner, arrêter)
-
efface l’écran quand le déplacement change.

Télécharger dans le robot et tester
Télécharger dans le robot et tester
Télécharger dans le robot et tester

N2/Se déplacer, détecter un obstacle

1/ Observer le script ci-dessous et expliquer, sur votre cahier, en langage naturel, ce que le robot fera.
Utiliser les menus



2/ Reproduire ce script sur Mblock 5.
Télécharger dans le robot et tester
N3/ Detecter une LIGNE et une COULEUR

Maintenant que vous savez rouler et détecter des obstacles avec votre voiture autonome, vous allez tenter de répondre à une des fonctions principales de la voiture sans conducteur :
Comment se déplacer de manière autonome d’un point A à un point B (suivre une route) ?
Mais comment suivre une route et réaliser un virage à droite et à gauche ?
Utilisation du capteur quad RGB:
Nous allons utiliser le capteur situé à l’avant de notre MBot.
Le principe de fonctionnement est le suivant :
– Lorsque le cpateur détecte une couleur claire la valeur "ligne" est à 0.
– Lorsque le capteur détecte une couleur foncée la valeur " ligne" est à 1.
Voici un exemple de ce que détecte le capteur quad RGB lorsuqu'il détecte une ligne noire qui tourne vers la droite:


Utiliser l'instruction suivante:

ligne
1) Reproduire le script suivant sur Mblock5 et le COMPLETER à partir des informations précédentes:

On remarque ici qu'il y a les 3 codes binaires: 0010, 0011 et 0001 correspondant aux 3 situations pour lesquelles le robot devra tourner à droite, quand la ligne noire tourne à droite.
Ce "sous programme" n'est pas terminé, à vous de le compléter ...
0010
0011
0001
?
?
Télécharger dans le robot et tester
Voyons maintenant si tout est bien compris !
A l’aide de la photo du capteur ci-contre.
Complétez ci-dessous, une partie de l’algorithme permettant au robot de suivre une ligne noire en réalisant des virages à droite et à gauche et en s’arrêtant à la fin de la ligne :
- Si les capteurs L1 et R1 voient du noir et L2 et R2 voient du Blanc alors …….
- Si les capteurs L2 et L1 voient du Blanc et R1 et R2 voient du Noir alors …….
- Si les capteurs … et … voient du Blanc et … et … voient du Noir alors tourner à gauche

2) Modifier le programme en ajoutant des instructions pour que le robot:
-
prenne correctement les virages à angle droit (à droite)
-
et détecte une couleur pour aller dans une direction donnée
Ajouter ce "sous programme", qui est incomplet, il y a également des erreurs à modifier:

Télécharger dans le robot et tester


Calibrer les capteurs:

N4-1/Eviter un obstacle, s'Arrêter dans un garage
1/ Éviter l’obstacle : Ajouter un "sous programme" OBSTACLE et réaliser la séquence
ci-dessous:
2/ S’arrêter au garage :
Le capteur ultrason ne fait pas la différence entre l'obstacle et le garage. Résultat: si vous ne changez pas votre programme, le robot va vouloir contourner le garage !
Comment différencier l’obstacle du garage, pour que le robot s’arrête dans le garage ?
>> Créer une variable garage pour différencier l’obstacle du garage.
L’objectif sera que cette variable soit égale à 1 si le robot est devant le garage ( ) ou égale à 0 si le robot est devant l’obstacle afin de pouvoir déclencher la séquence d’évitement de l’obstacle ou la séquence d’arrêt devant le robot.
Au début du programme principal (lorsque CyberPi démarre) définir la variable garage à 0
car on est sur que sur la piste le robot rencontrera d’abord l’obstacle.
Ajouter ce script et le modifier:






Télécharger dans le robot et tester
?

Télécharger dans le robot et tester
Pour le défi
parcours imposé
N4-2/Rechercher, se diriger vers l'objet et le déplacer
Pour le défi CURLING
3 phases différentes:
-
Chercher : Tourner à droite, à gauche, jusqu'à voir un objet à moins de 50 cm.
-
Foncer : Une fois l'objet repéré, avancer vers lui.
-
Pousser : Stop dès qu'on est à 10 cm pour éviter la collision et pousser jusquà la ligne noire
Programmer une RECHERCHE d'objet (20 minutes)
Algorithme :
-
Balayer à droite (90°).
-
Revenir au centre (90° à gauche).
-
Balayer à gauche (90°).
-
Revenir au centre (90° à droite).
-
Si rien n'est vu : Avancer de 2 cm.
-
Si l'objet est vu (< 50 cm) : Foncer vers lui et s'arrêter à 15 cm.
Répéter indéfiniment :
--- Début du Balayage ---
-
Si distance > 50 alors : Pivoter à Droite de 90°
-
Si distance > 50 alors : Pivoter à Gauche de 90° (Retour à 0°)
-
Si distance > 50 alors : Pivoter à Gauche de 90°
-
Si distance > 50 alors : Pivoter à Droite de 90° (Retour à 0°)
--- Action au point 0 ---
-
Si distance > 50 alors : Avancer de 2 cm *
-
Si distance <= 50 alors : phase d'approche
Ne pas utiliser ainsi, tester avec des instructions comme "Répéter jusqu'à ce que (Distance < 50)" ou "attendre jusqu'à ..." et faire en sorte de pivoter doucement ... (ex: 9 fois à 10° vitesse lente)
Programmer une APPROCHE vers l'objet (15 minutes)
Algorithme :
Tant que distance > 10 cm : - Avancer tout droit - Surveiller la distance - S'arrêter près de l'objet
Répéter jusqu'à ce que [capteur ultrason < 10]
Moteur gauche vitesse [40] Moteur droit vitesse [40]
Attendre [0.1] secondes
Moteur gauche vitesse [0] Moteur droit vitesse [0] pendant 2 secondes (Arrêt bref)
Conseil : tester cette phase en plaçant l'objet devant le robot.
Programmer une POUSSÉE de l'objet (10 minutes)
Algorithme :
Tant que pas sur ligne noire : - Avancer (pousser l'objet) - Vérifier les capteurs de ligne - Si ligne noire détectée → arrêter.
Répéter jusqu'à ligne noire détectée
Moteur gauche vitesse [35] Moteur droit vitesse [35]
Si [capteur de ligne détecte NOIR] alors
Moteur gauche vitesse [0] Moteur droit vitesse [0]

Télécharger dans le robot et tester
Télécharger dans le robot et tester
Télécharger dans le robot et tester
Programmer les 2 defis du challenge robotique
Faire les programmes des 2 défis de programmation: parcours imposé et curling transmis par le lycée A. Claveille.
AIDE: N'hésitez pas à utiliser les SOUS PROGRAMMES "Mes blocs" pour toutes les instructions qui se répètent !

